PointRegGPT: Boosting 3D Point Cloud Registration using Generative Point-Cloud Pairs for Training
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
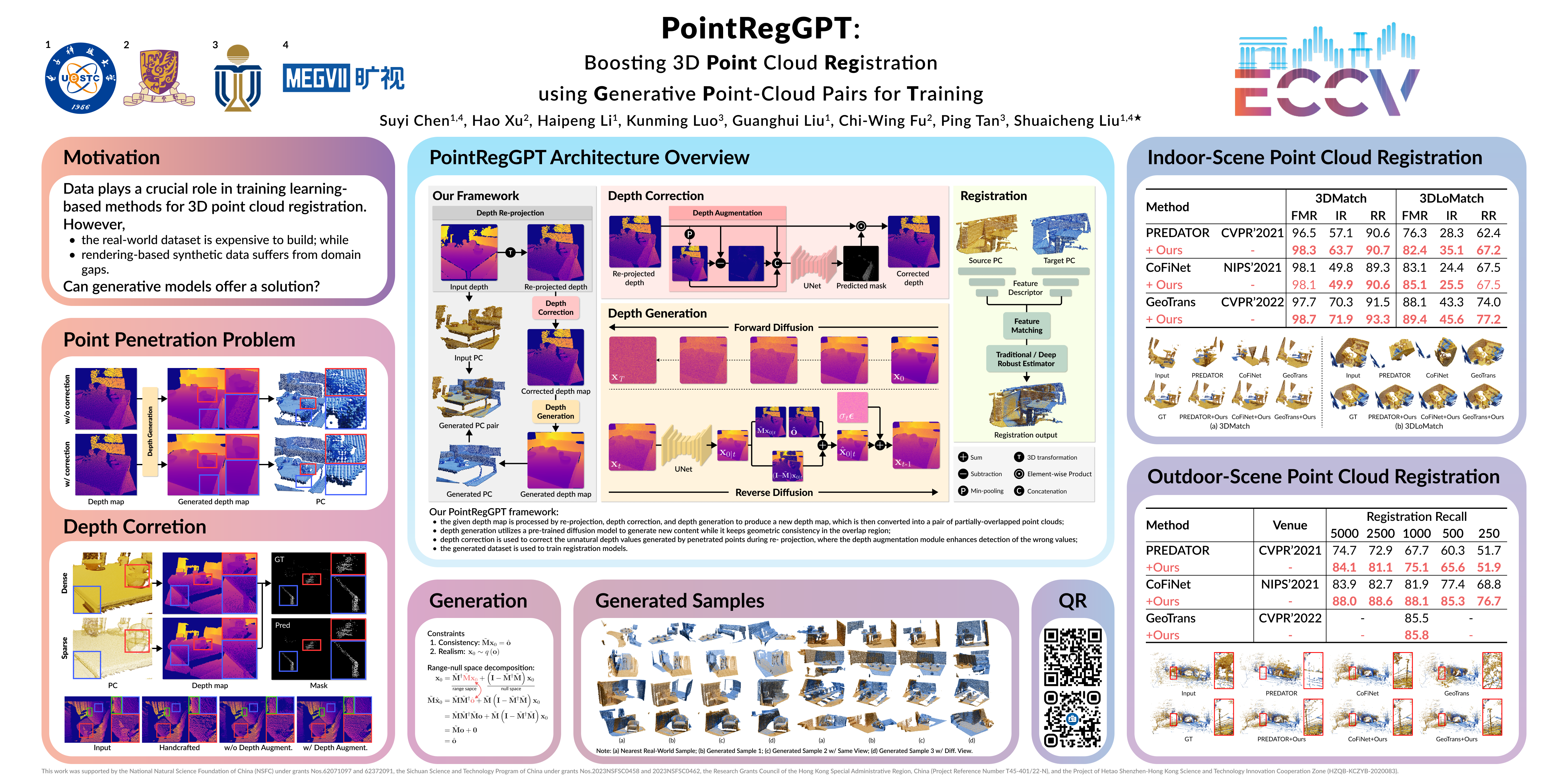
Data plays a crucial role in training learning-based methods for 3D point cloud registration. However, the real-world dataset is expensive to build, while rendering-based synthetic data suffers from domain gaps. In this work, we present PointGPT, boosting 3D Point cloud registration using Generative Point-cloud pairs for Training. Given a single depth map, we first apply a random camera motion to re-project it into a target depth map. Converting them to point clouds gives a training pair. To enhance the data realism, we formulate a generative model as a depth inpainting diffusion to process the target depth map with the re-projected source depth map as the condition. Also, we design a depth correction module to alleviate artifacts caused by point penetration during the re-projection. To our knowledge, this is the first generative approach that explores realistic data generation for indoor point cloud registration. When equipped with our approach, several recent algorithms can improve their performance significantly and achieve SOTA consistently on two common benchmarks. The code and dataset will be released upon publication.