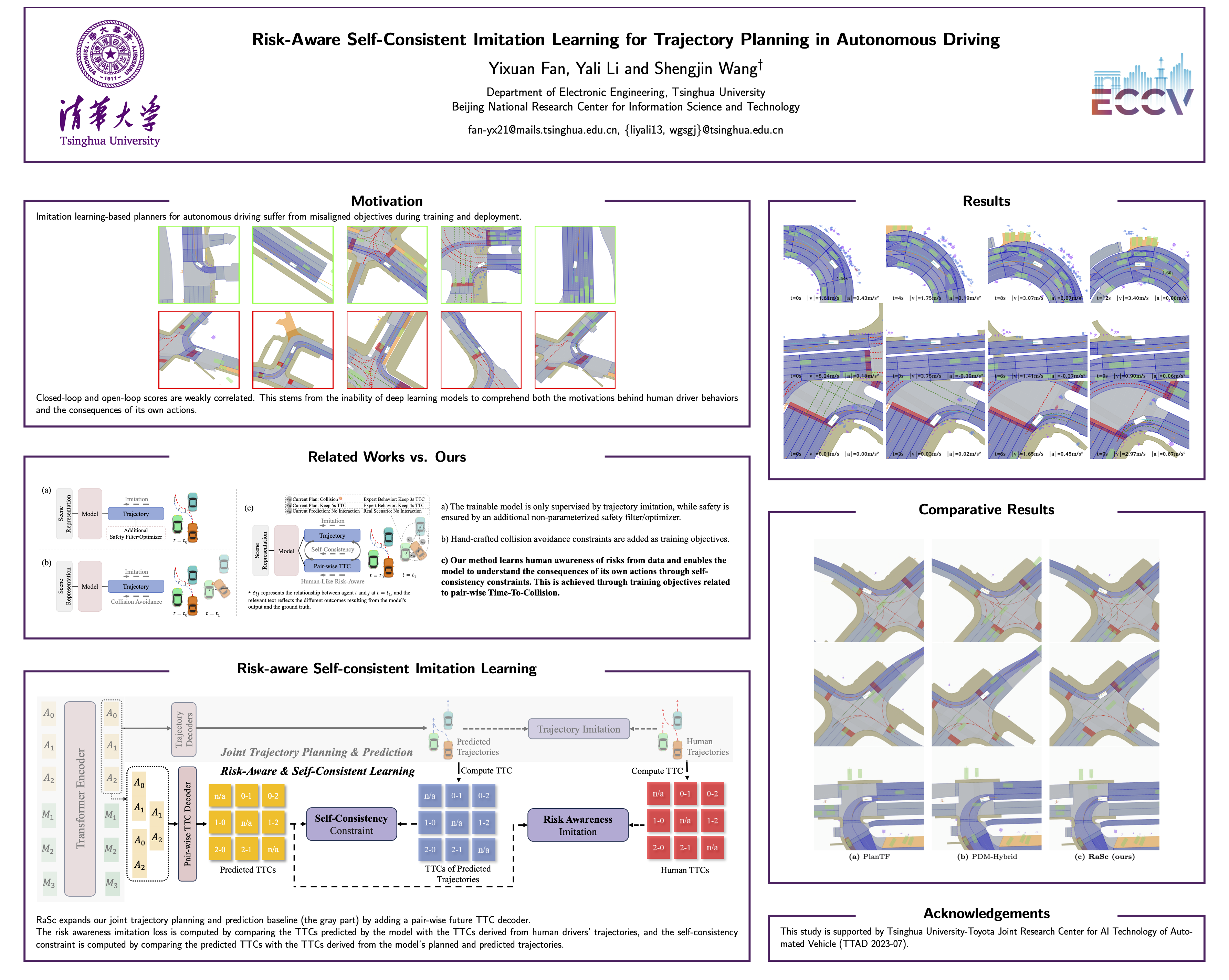
Risk-Aware Self-Consistent Imitation Learning for Trajectory Planning in Autonomous Driving
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Planning for the ego vehicle is the ultimate goal of autonomous driving. Although deep learning-based methods have been widely applied to predict future trajectories of other agents in traffic scenes, directly using them to plan for the ego vehicle is often unsatisfactory. This is due to misaligned objectives during training and deployment: a planner that only aims to imitate human driver trajectories is insufficient to accomplish driving tasks well. We argue that existing training processes may not endow models with an understanding of how the physical world evolves. To address this gap, we propose RaSc, which stands for Risk-aware Self-consistent imitation learning. RaSc not only imitates driving trajectories, but also learns the motivations behind human driver behaviors (to be risk-aware) and the consequences of its own actions (by being self-consistent). These two properties stem from our novel prediction branch and training objectives regarding Time-To-Collision (TTC). Moreover, we enable the model to better mine hard samples during training by checking its self-consistency. Our experiments on the large-scale real-world nuPlan dataset demonstrate that RaSc outperforms previous state-of-the-art learning-based methods, in both open-loop and, more importantly, closed-loop settings.