PACE: Pose Annotations in Cluttered Environments
{kind=link}
Abstract
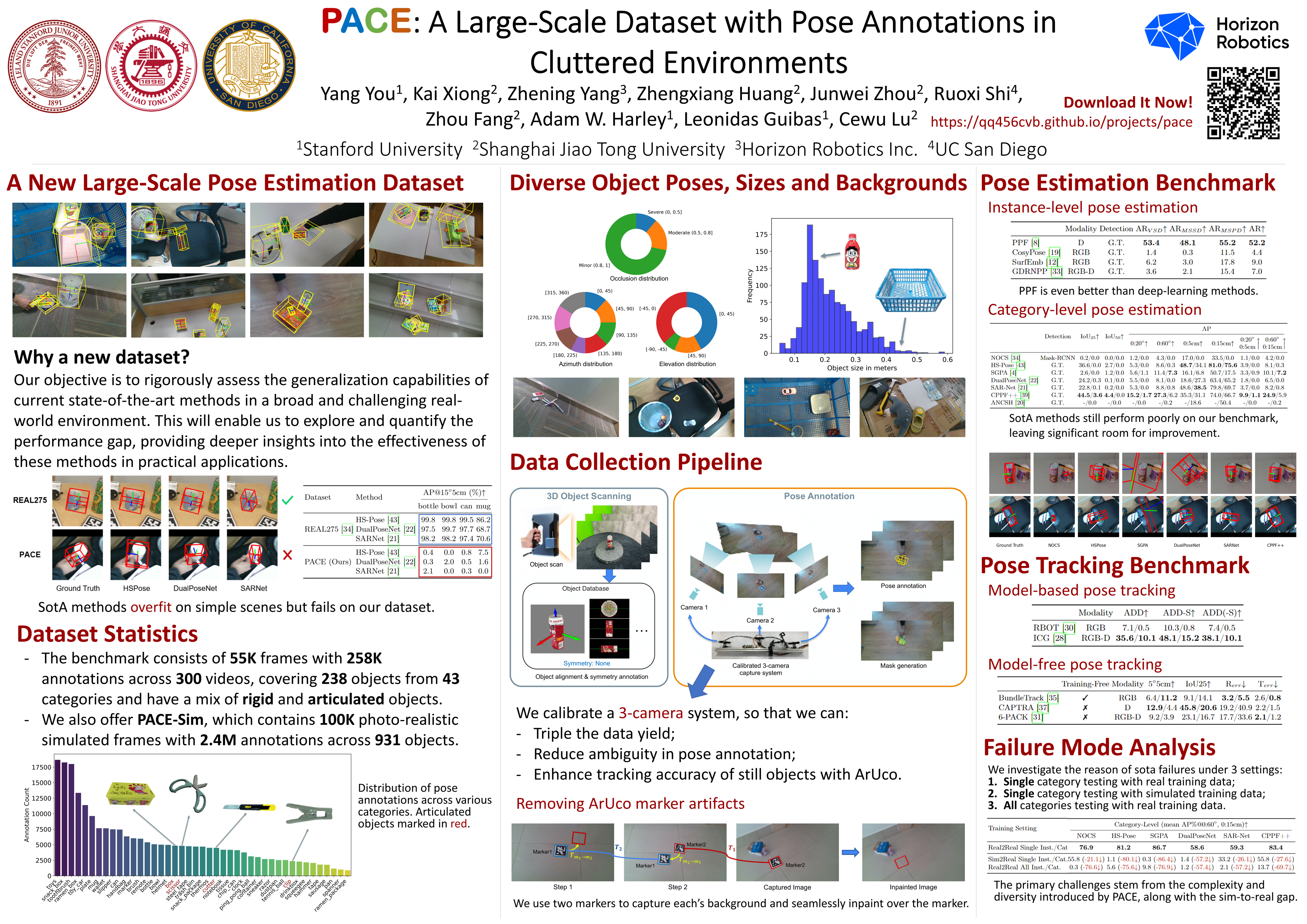
Pose estimation is a crucial task in computer vision, enabling tracking and manipulating objects in images or videos. While several datasets exist for pose estimation, there is a lack of large-scale datasets specifically focusing on cluttered scenes with occlusions. This limitation is a bottleneck in the development and evaluation of pose estimation methods, particularly toward the goal of real-world application in environments where occlusions are common. Addressing this, we introduce PACE (Pose Annotations in Cluttered Environments), a large-scale benchmark designed to advance the development and evaluation of pose estimation methods in cluttered scenarios. PACE encompasses 54,945 frames with 257,673 annotations across 300 videos, covering 576 objects from 44 categories and featuring a mix of rigid and articulated items in cluttered scenes. To annotate the real-world data efficiently, we developed an innovative annotation system utilizing a calibrated 3-camera setup. We test state-of-the-art algorithms in PACE along two tracks: pose estimation, and object pose tracking, revealing the benchmark's challenges and research opportunities. We plan to release PACE as a public evaluation benchmark, along the annotations tools we developed, to stimulate further advancements in the field. Our code and data will be publicly available.