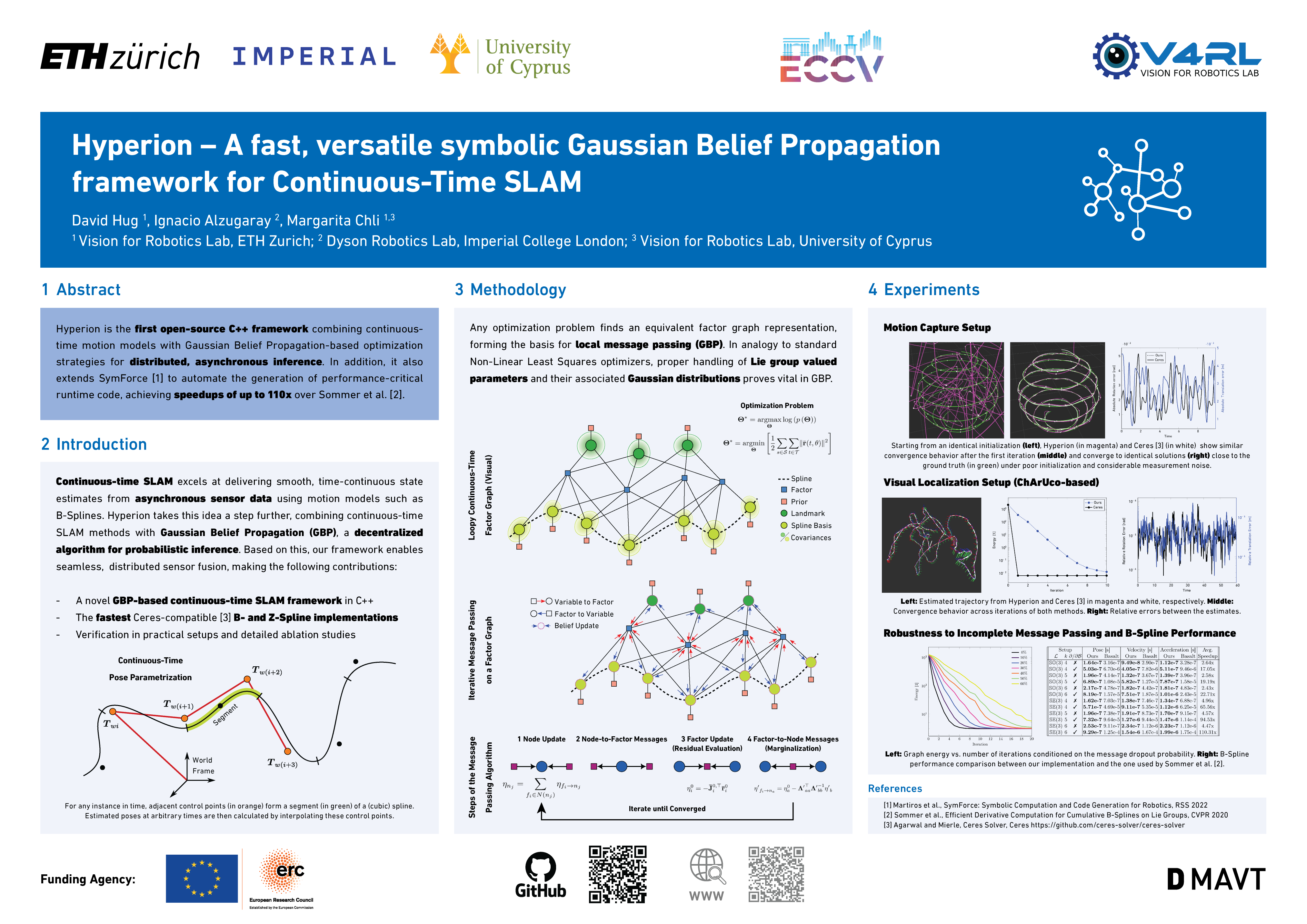
Hyperion – A fast, versatile symbolic Gaussian Belief Propagation framework for Continuous-Time SLAM
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Continuous-Time Simultaneous Localization And Mapping (CTSLAM) has become a promising approach for fusing asynchronous and multi-modal sensor setups. Unlike Discrete-Time Simultaneous Localization And Mapping (DTSLAM), which estimates poses discretely, CTSLAM uses continuous-time motion parametrizations, facilitating the integration of a variety of sensors such as rolling-shutter cameras, event cameras and Inertial Measurement Units (IMUs). However, CTSLAM approaches remain computationally demanding and are conventionally posed as centralized Non-Linear Least Squares (NLLS ) optimizations. Targeting these limitations, we not only present the fastest SymForce-based [22] B- and Z-Spline implementations achieving speedups between 2.43x and 110.31x over Sommer et al. [41] but also implement a novel continuous-time Gaussian Belief Propagation (GBP) framework for iterative, decentralized probabilistic inference suitable for multi-agent operations. We demonstrate the efficacy of our open-sourced approach through practical experiments and provide in-depth ablation studies.