Visible and Clear: Finding Tiny Objects in Difference Map
{kind=link}
Abstract
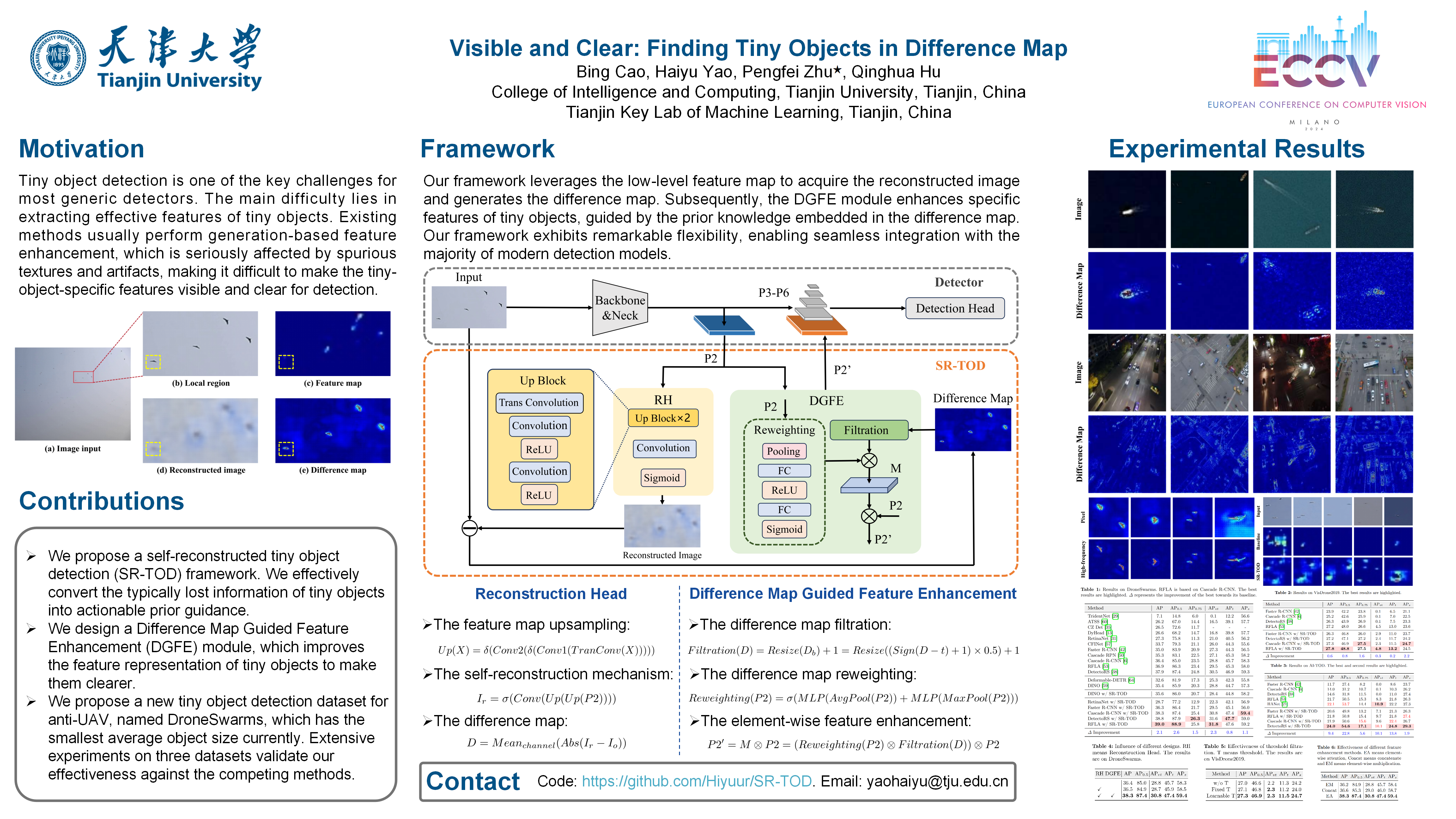
Tiny object detection is one of the key challenges in the field of object detection. The performance of most generic detectors dramatically decreases in tiny object detection tasks. The main challenge lies in extracting effective features of tiny objects. Existing methods usually perform generation-based feature enhancement, which is seriously affected by spurious textures and artifacts, making it difficult to make the tiny-object-specific features visible and clear for detection. To address this issue, we propose a self-reconstructed tiny object detection (SR-TOD) framework. We for the first time introduce a self-reconstruction mechanism in the detection model, and discover the strong correlation between it and the tiny objects. Specifically, we impose a reconstruction head in-between the neck of a detector, constructing a difference map of the reconstructed image and the input, which shows high sensitivity to tiny objects. This inspires us to enhance the weak representations of tiny objects under the guidance of the difference maps. Thus, improving the visibility of tiny objects for the detectors. Building on this, we further develop a Difference Map Guided Feature Enhancement (DGFE) module to make the tiny feature representation more clear. In addition, we further propose a new multi-instance anti-UAV dataset, which is called DroneSwarms dataset and contains a large number of tiny drones with the smallest average size to date. Extensive experiments on the DroneSwarms dataset and other datasets demonstrate the effectiveness of the proposed method. The code and dataset will be publicly available.