Lane Graph as Path: Continuity-preserving Path-wise Modeling for Online Lane Graph Construction
{kind=link}
Abstract
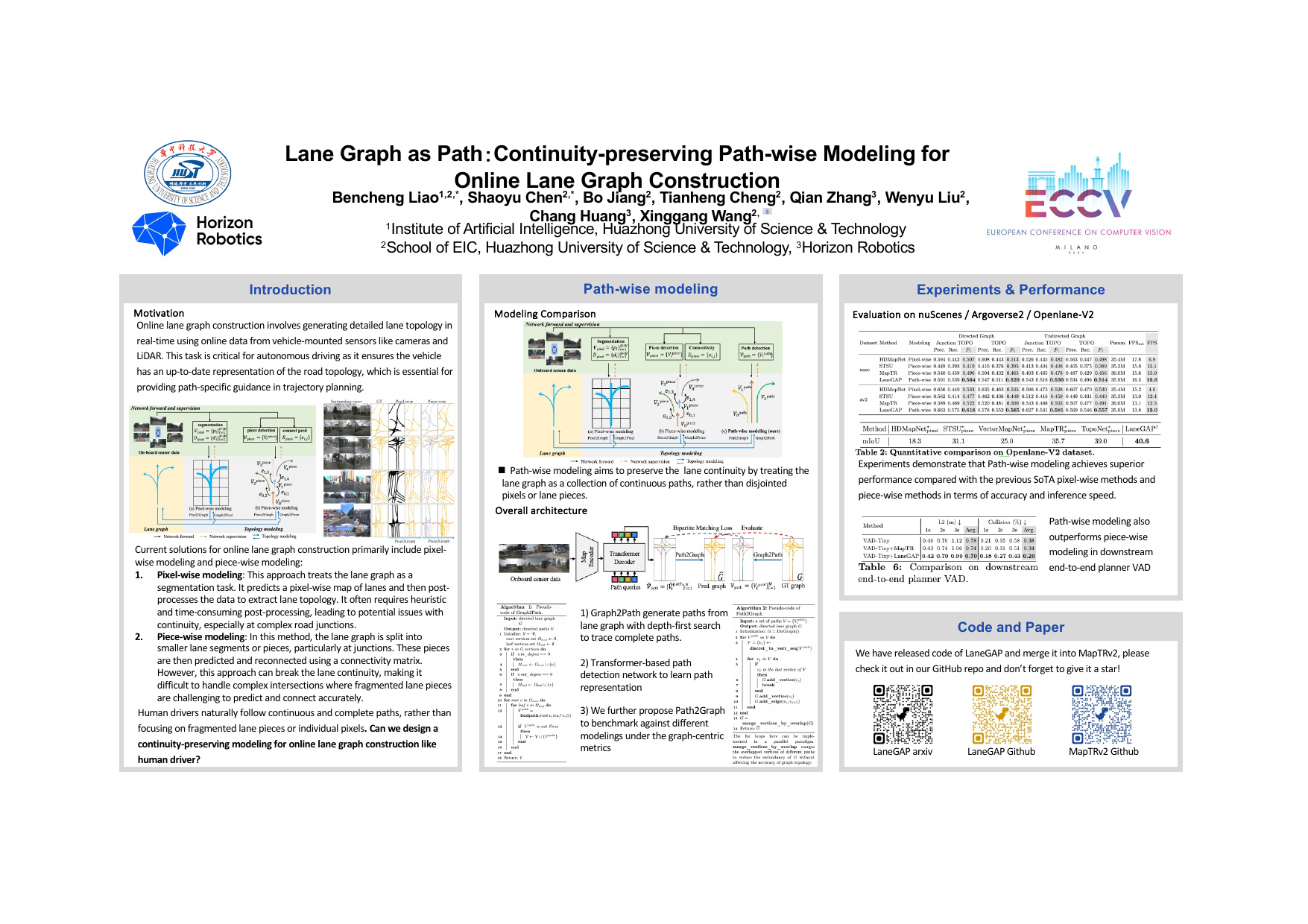
Online lane graph construction is a promising but challenging task in autonomous driving. Previous methods usually model the lane graph at the pixel or piece level, and recover the lane graph by pixel-wise or piece-wise connection, which breaks down the continuity of the lane and results in suboptimal performance. Human drivers focus on and drive along the continuous and complete paths instead of considering lane pieces. Autonomous vehicles also require path-specific guidance from lane graph for trajectory planning. We argue that the path, which indicates the traffic flow, is the primitive of the lane graph. Motivated by this, we propose to model the lane graph in a novel path-wise manner, which well preserves the continuity of the lane and encodes traffic information for planning. We present a path-based online lane graph construction method, termed LaneGAP, which end-to-end learns the path and recovers the lane graph via a Path2Graph algorithm. We qualitatively and quantitatively demonstrate the superior accuracy and efficiency of LaneGAP over conventional pixel-based and piece-based methods on the challenging nuScenes and Argoverse2 datasets under controllable and fair conditions. Compared to the recent state-of-the-art piece-wise method TopoNet on the OpenLane-V2 dataset, LaneGAP still outperforms by 1.6 mIoU, further validating the effectiveness of path-wise modeling. Abundant visualizations in the supplementary material show LaneGAP can cope with diverse traffic conditions. Code and models will be released for facilitating future research.