Learning Local Pattern Modularization for Point Cloud Reconstruction from Unseen Classes
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
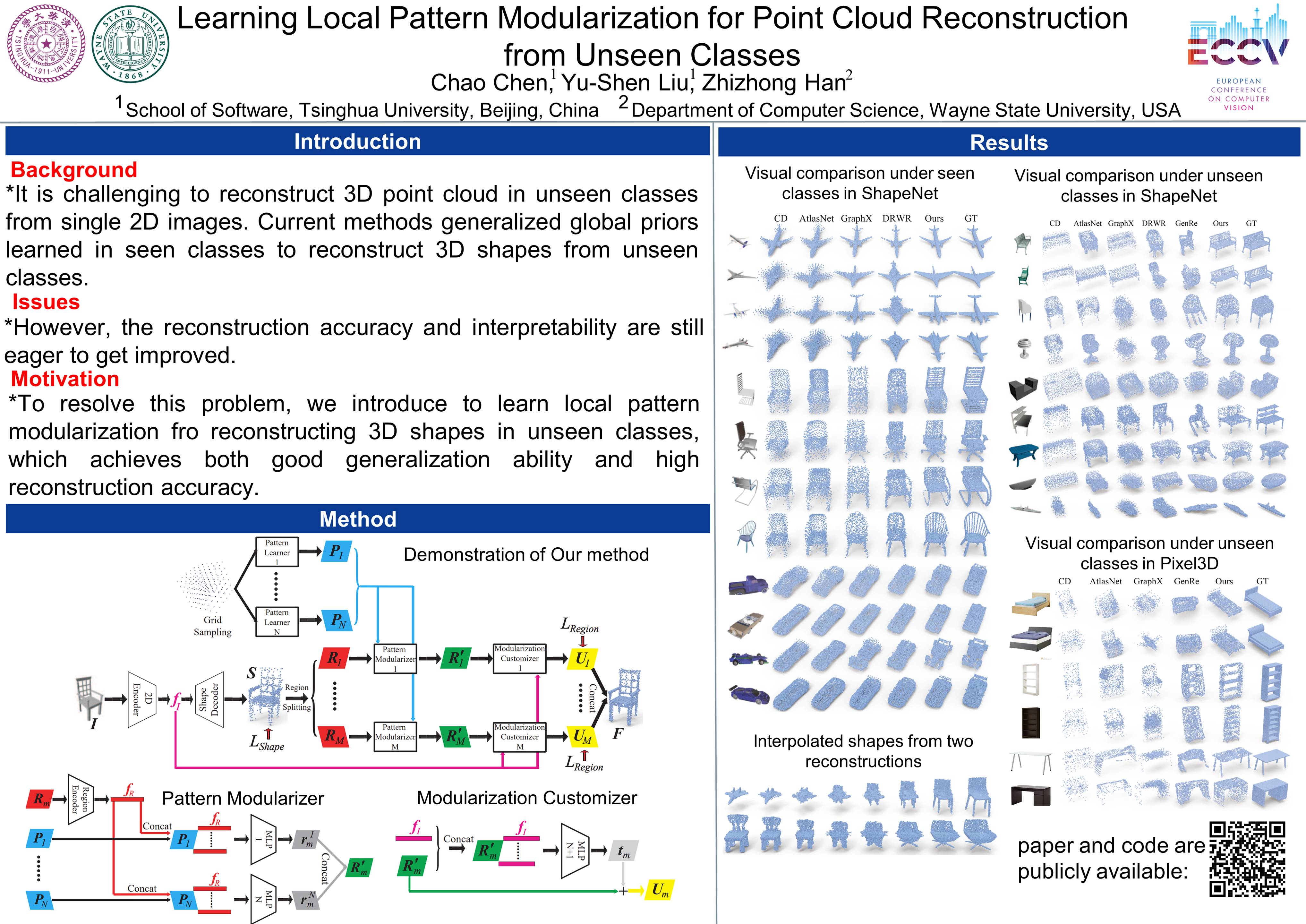
It is challenging to reconstruct 3D point clouds in unseen classes from single 2D images. Instead of object-centered coordinate system, current methods generalized global priors learned in seen classes to reconstruct 3D shapes from unseen classes in viewer-centered coordinate system. However, the reconstruction accuracy and interpretability are still eager to get improved. To resolve this issue, we introduce to learn local pattern modularization for reconstructing 3D shapes in unseen classes, which achieves both good generalization ability and high reconstruction accuracy. Our insight is to learn a local prior which is class-agnostic and easy to generalize in object-centered coordinate system. Specifically, the local prior is learned via a process of learning and customizing local pattern modularization in seen classes. During this process, we first learn a set of patterns in local regions, which is the basis in the object-centered coordinate system to represent an arbitrary region on shapes across different classes. Then, we modularize each region on an initially reconstructed shape using the learned local patterns. Based on that, we customize the local pattern modularization using the input image by refining the reconstruction with more details. Our method enables to reconstruct high fidelity point clouds from unseen classes in object-centered coordinate system without requiring a large number of patterns or any additional information, such as segmentation supervision or camera poses. Our experimental results under widely used benchmarks show that our method achieves the state-of-the-art reconstruction accuracy for shapes from unseen classes.