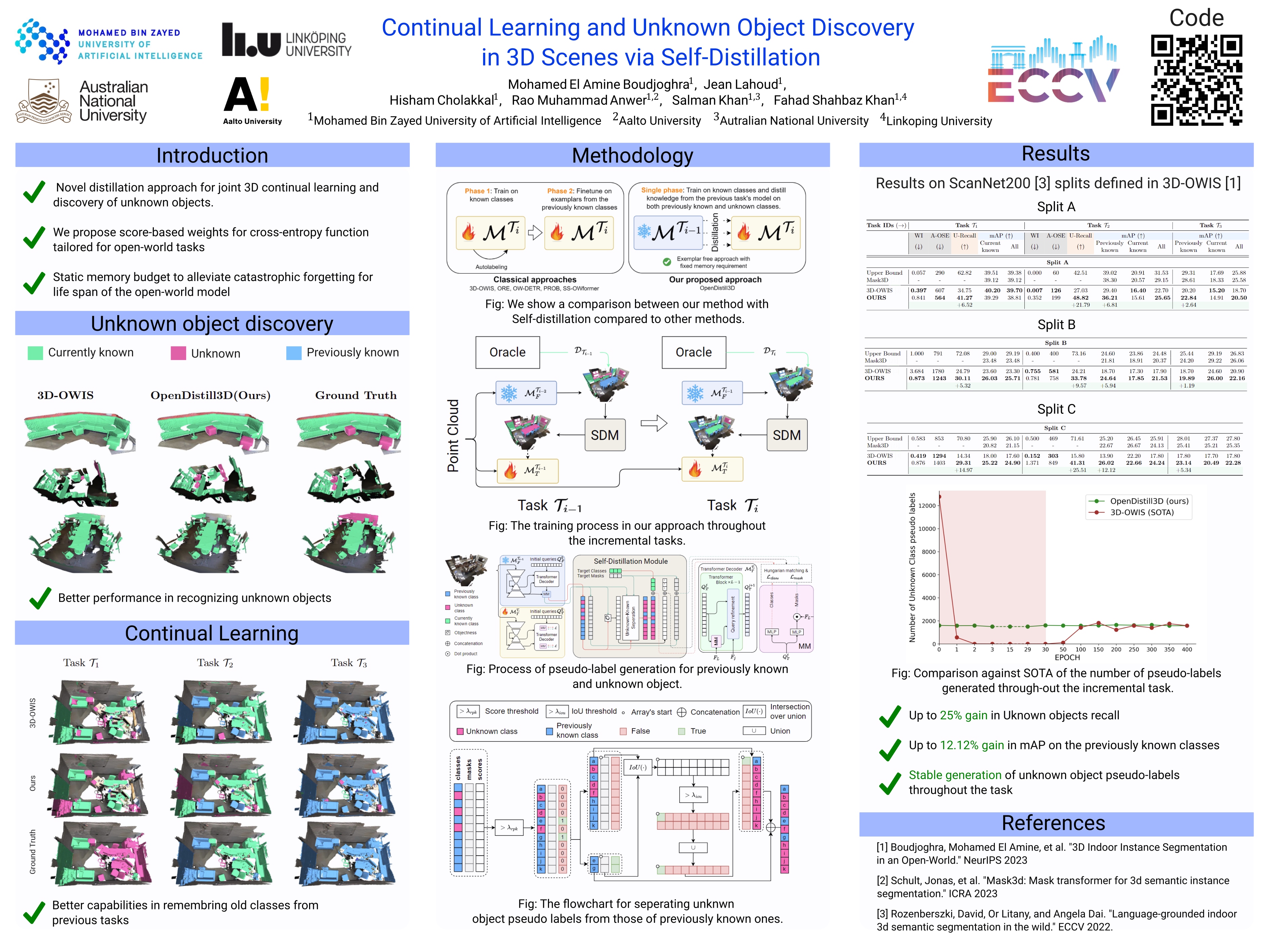
Continual Learning and Unknown Object Discovery in 3D Scenes via Self-Distillation
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Open-world 3D instance segmentation is a recently introduced problem with diverse applications, notably in continually learning embodied agents. This task involves segmenting unknown instances, and learning new instances when their labels are introduced. However, prior research in the open-world domain has traditionally addressed the two sub-problems, namely continual learning and unknown object identification, separately. This approach has resulted in limited performance on unknown instances and cannot effectively mitigate catastrophic forgetting. Additionally, these methods bypass the utilization of the information stored in the previous version of the continual learning model, instead relying on a dedicated memory to store historical data samples, which inevitably leads to an expansion of the memory budget. In this paper, we argue that continual learning and unknown class identification should be tackled in conjunction. Therefore, we propose a new exemplar-free approach for 3D continual learning and the discovery of unknown classes through self-distillation. Our approach leverages the pseudo-labels generated by the model from the preceding task to improve the unknown predictions during training while simultaneously mitigating catastrophic forgetting. By integrating these pseudo-labels into the continual learning process, we achieve enhanced performance in handling unknown classes. We validate the efficacy of the proposed approach via comprehensive experiments on various splits of the ScanNet200 dataset, showcasing superior performance in continual learning and unknown class retrieval compared to the state-of-the-art. Our codes will be publicly released.