LiDAR-based All-weather 3D Object Detection via Prompting and Distilling 4D Radar
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
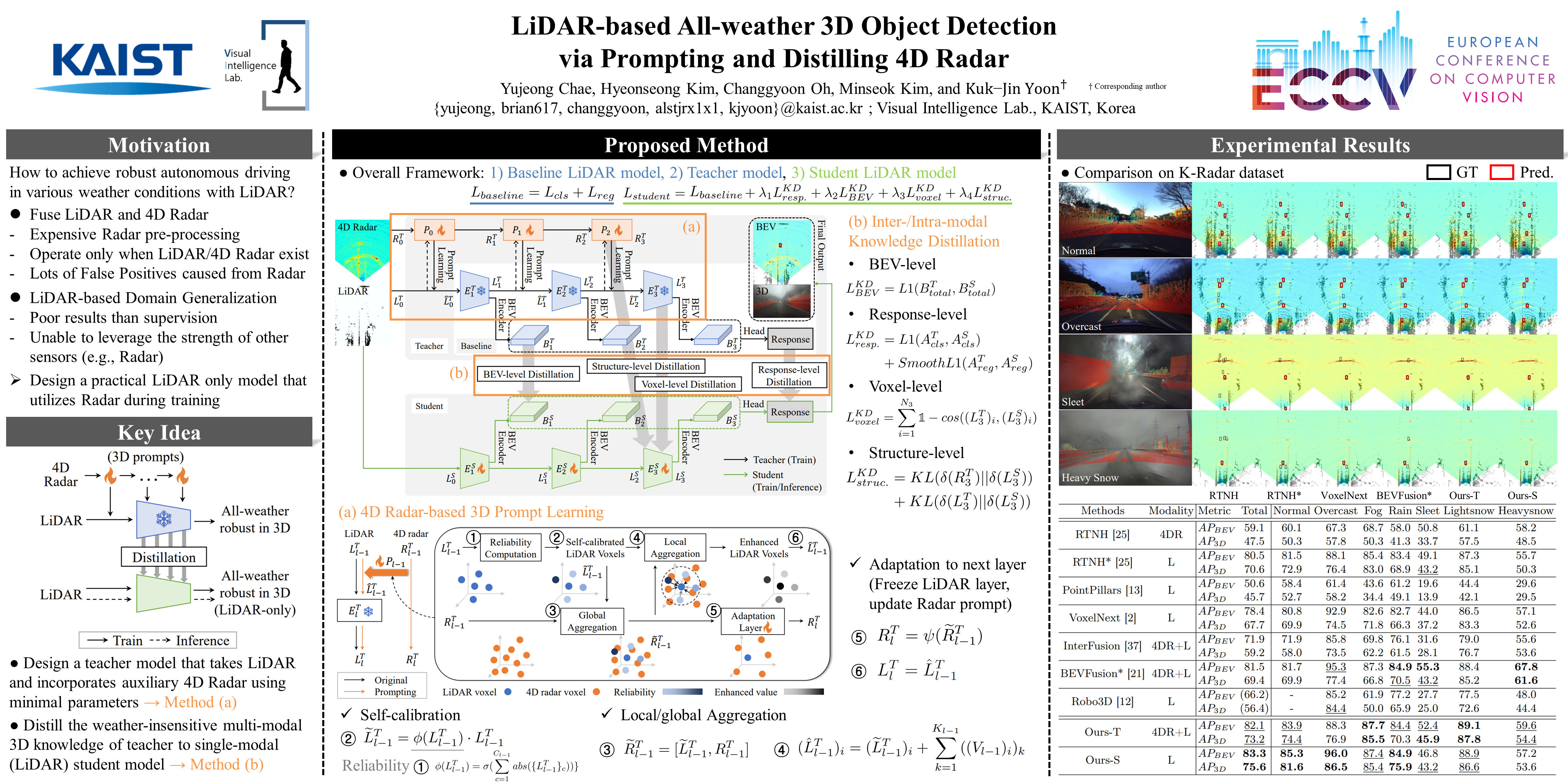
LiDAR-based 3D object detection models show remarkable performance, however their effectiveness diminishes in adverse weather. On the other hand, 4D radar exhibits strengths in adverse weather but faces limitations in standalone use. While fusing LiDAR and 4D radar seems to be the most intuitive approach, this method comes with limitations, including increased computational load due to radar pre-processing, situational constraints when both domain information is present, and the potential loss of sensor advantages through joint optimization. In this paper, we propose a novel LiDAR-only-based 3D object detection framework that works robustly in all-weather (normal and adverse) conditions. Specifically, we first propose 4D radar-based 3D prompt learning to inject auxiliary radar information into a LiDAR-based pre-trained 3D detection model while preserving the precise geometry capabilities of LiDAR. Subsequently, using the preceding model as a teacher, we distill weather-insensitive features and responses into a LiDAR-only student model through our four levels of inter-/intra-modal knowledge distillation. Extensive experiments demonstrate that our prompt learning effectively integrates the strengths of LiDAR and 4D radar, and our LiDAR-only student model even surpasses the detection performance of teacher and state-of-the-art models under various weather. Code will be released.