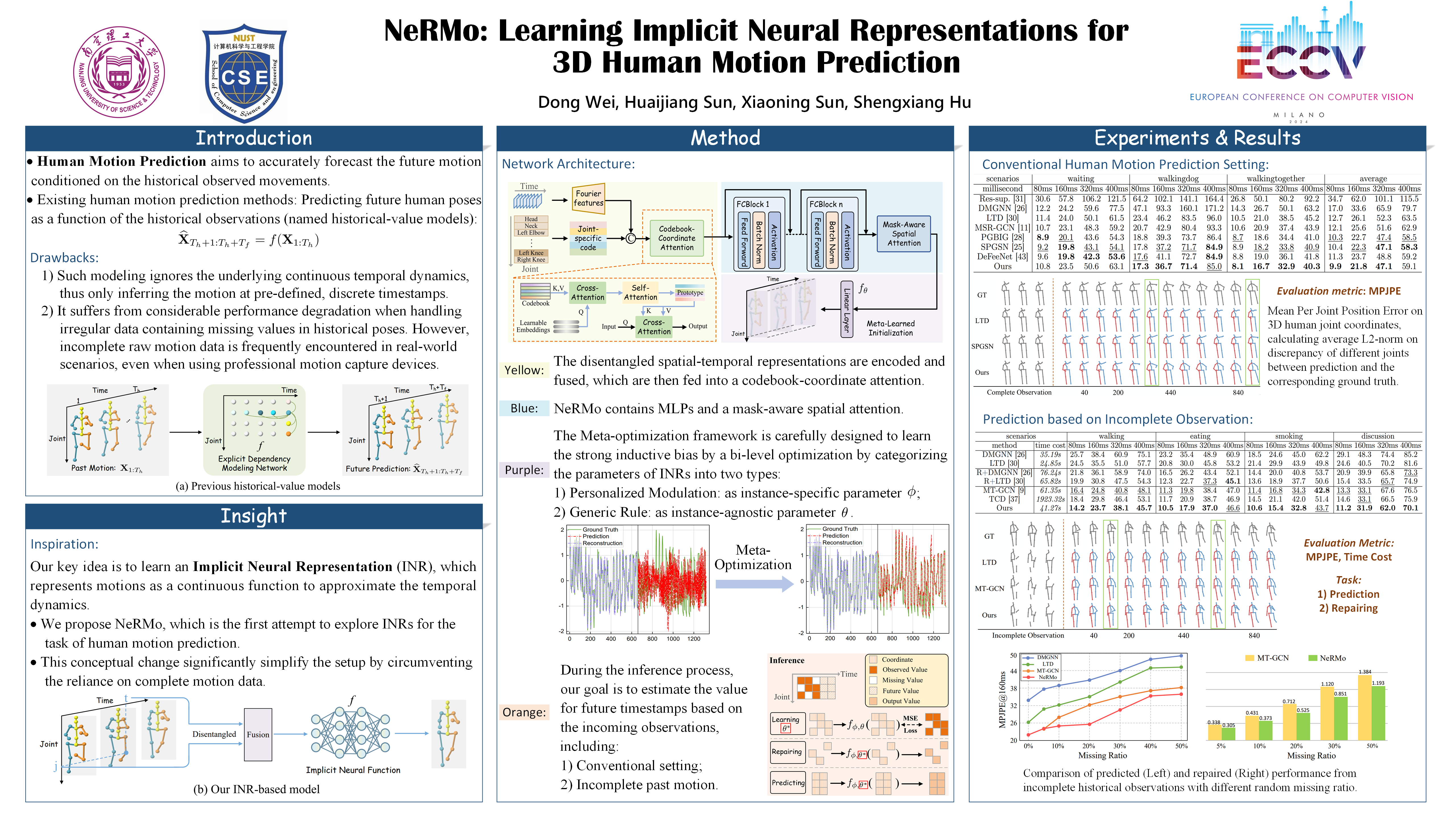
NeRMo: Learning Implicit Neural Representations for 3D Human Motion Prediction
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Predicting accurate future human poses from historically observed motions remains a challenging task due to the spatial-temporal complexity and continuity of motions. Previous historical-value methods typically interpret motion as discrete consecutive frames, which neglects the continuous temporal dynamics and impedes the capability of handling incomplete observations (with missing values). In this paper, we propose an implicit Neural Representation method for human Motion prediction, dubbed NeRMo, which represents the motion as a continuous function parameterized by a neural network. The core idea is to design a new coordinate system where NeRMo takes joint-time index as input and outputs the corresponding 3D skeleton position. This separate and flexible treatment of space and time allows NeRMo to combine the following advantages. It extrapolates at arbitrary body joints and temporal locations; it can learn from both complete and incomplete observed past motions; it provides a unified framework for repairing missing values and forecasting future poses using a single trained model. In addition, we show that NeRMo exhibits compatibility with meta-learning methods, enabling it to effectively generalize to unseen time steps. Extensive experiments conducted on classical benchmarks have confirmed the superior prediction performance of our joint-time index method compared to existing historical-value baselines.